Droni: confronto tra i sensori Mapir e Parrot Sequoia
Attività sperimentale di agricoltura di precisione sui vigneti dell’azienda Savignola Paolina nel Chianti.
di Simone Kartsiotis, Gianluca Rossetti, Emanuele Luigi de Angelis

1. Introduzione
Nel mese di Giugno 2017 Zephyr e DroneBee hanno svolto insieme alcune sperimentazioni con APR Aeromobili a Pilotaggio Remoto) sui vigneti dell’azienda agricola Savignola Paolina nel Chianti Classico, in Toscana. I test avevano l’obiettivo di valutare e di mettere a confronto la qualità dei dati forniti dalle camere multispettrali Parrot Sequoia e Mapir Survey2.
Le camere multispettrali in generale sono progettate per acquisire separatamente diverse bande dello spettro della luce. Misurando la riflettanza della vegetazione nelle diverse bande è possibile calcolare dei particolari indici vegetativi, come NDVI o SAVI, che danno informazioni importanti sullo stato di salute della pianta.
L’andamento degli indici è poi visionabile dall’agronomo attraverso le cosiddette “mappe di vigore” generate in post-processing con appositi software. Grazie alla loro compattezza e leggerezza, Sequoia e Mapir sono fra le camere più utilizzate in attività di agricoltura di precisione effettuate con APR.
Sebbene siano entrambe utilizzate con lo scopo di generare mappe indicizzate, queste camere hanno differenze tecnologiche sostanziali che determinano delle pratiche diverse per un loro corretto utilizzo sul campo. Di seguito vengono riportate le principali caratteristiche delle due camere.

Come prima differenza sostanziale, le Mapir registrano ciascuna un’unica banda, dunque è necessario imbarcare sull’APR almeno due camere, RED e NIR, per l’analisi NDVI (esiste anche la camera accoppiata RED+NIR che registra contemporaneamente le due bande ma, essendo la camera single imager, cioè con un solo sensore per registrare entrambe le bande, i dati raccolti soffrono della sovrapposizione parziale di queste ultime, conducendo a mappe di vigore meno precise).
La camera Sequoia non ha questo problema in quanto possiede in un unico corpo, oltre che un sensore RGB, ben quattro sensori multispettrali separati che consentono l’acquisizione sincronizzata delle immagini nelle diverse bande. Per contro, la risoluzione dei sensori di Sequoia è più bassa (1.2 MP contro 16 MP di Mapir) e questo può in parte condurre ad una più bassa precisione del risultato se si lavora su colture a filare o a crescita verticale come i vigneti.
A differenza di Mapir, Sequoia integra al suo interno un set di sensori di posizione e assetto utilizzati per la georeferenziazione delle immagini acquisite, inoltre possiede un sensore di luminosità, da montare separatamente sull’APR, che permette la calibrazione automatica dei quattro sensori multispettrali. Quest’ultima caratteristica è molto importante perché permette un confronto veritiero fra diverse acquisizioni effettuate per lo stesso terreno agricolo ma in condizioni di luce differenti e/o in periodi diversi, in quanto permette di generare dei valori assoluti in termini di riflettanza.
Mapir non dispone di un sensore GPS integrato né di un sensore di luminosità, di conseguenza le immagini vanno georeferenziate a posteriori e le acquisizioni possono perdere di valore se le condizioni di luce vanno a modificarsi durante la missione, ad esempio se il sole viene coperto dalle nuvole.
In generale è buona norma non effettuare rilievi in condizioni di nuvolosità irregolare ma in condizione di cielo sereno oppure coperto, in modo da evitare le ombre generate dalle nuvole. Tuttavia, in condizioni di cielo coperto, solo la Sequoia può dare dei risultati corretti poiché registra la luminosità corrente durante il volo.
La georeferenziazione delle immagini Mapir è possibile solo utilizzando dati di posizione e assetto provenienti da sistemi esterni; in genere si usano i dati forniti dall’autopilota dell’APR se questo li rende disponibile.
In conclusione si può affermare che le operazioni di sincronizzazione, di georeferenziazione e di calibrazione delle immagini ottenute con le Mapir risultano decisamente più complesse e articolate rispetto alla camera Sequoia, per contro quest’ultima ha un costo d’acquisto maggiore e una risoluzione dei sensori multispettrali più bassa che per certi tipi di colture potrebbe risultare uno svantaggio.
2. I Test
Nell’azienda agricola Savignola Paolina è stata scelta una porzione di vigneti su cui Zephyr ha effettuato tre missioni di rilevamento. Zephyr utilizza l’APR EXOS, un esarotore ad elevata autonomia di produzione propria, con a bordo Parrot Sequoia stabilizzata su gimbal a due assi.
I voli si sono svolti al mattino, a mezzogiorno e nel primo pomeriggio, in modo da avere condizioni di luce differenti per ogni set di immagini. Inoltre durante lo svolgersi del terzo volo il cielo risultava parzialmente velato da nuvole passeggere.
Tutte le missioni sono state pianificate tramite stazione di terra e si sono svolte in modalità di volo automatico con terrain following per tenere in conto della pendenza del terreno, in modo da acquisire foto ortogonali al terreno stesso e dalla stessa altezza relativa (caratteristica necessaria per la correttezza dei dati). Le altezze sono state impostate a 50 metri (missione 1) e 60 metri (missione 2 e 3), la velocità a 5 m/s e overlap dei fotogrammi a 80%.
Prima di effettuare i voli si è proceduto con la calibrazione dell’IMU e del magnetometro di Sequoia; inoltre prima di ogni singolo volo, sono state scattate le foto ai bersagli di calibrazione radiometrica per una corretta analisi dei dati.
Per le camere Mapir si sono usate identiche impostazioni di volo ma si è effettuato un unico volo, effettuato subito dopo la seconda missione di EXOS, quindi a mezzogiorno. Le camere Mapir sono state montate a bordo di un DJI Phantom 3 Pro tramite apposito supporto. Il tempo impiegato per ogni missione è stato di 20-25 minuti.
Per la generazione delle mappe di vigore è stato utilizzato il software Pix4D e per il post-processing il software QGis. Il confronto è stato ottenuto valutando l’indice NDVI (Normalized Difference Vegetation Index) per entrambe le camere. Il NDVI è definito come il rapporto fra differenza e somma di NIR e RED ed è uno degli indici più utilizzati in agricoltura di precisione per via della sua semplicità di calcolo ma risulta molto sensibile alle variazioni atmosferiche e alla riflettanza del suolo.
Per ovviare a quest’ultimo problema si utilizza spesso l’indice SAVI (Soil Adjusted Vegetation Index) che corregge il NDVI dagli effetti del suolo (cosa particolarmente importante per i vigneti in cui il suolo tra i filari è molto esposto e potrebbe falsare il risultato finale).
3. Risultati
3.1 Camera Sequoia
Di seguito sono visualizzabili figure a bassa risoluzione relative ai risultati ottenuti con i tre voli.
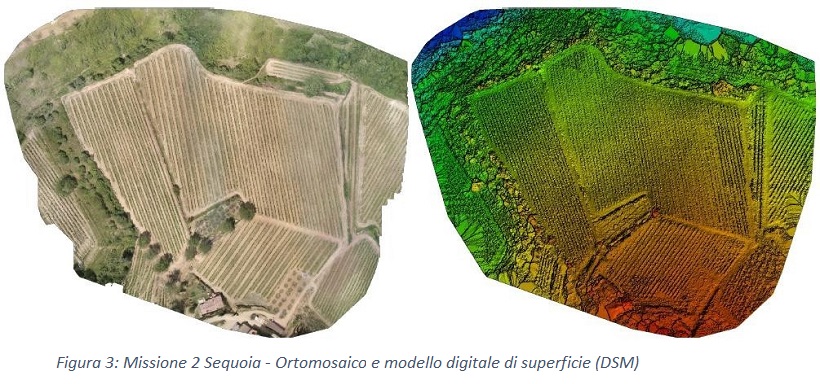
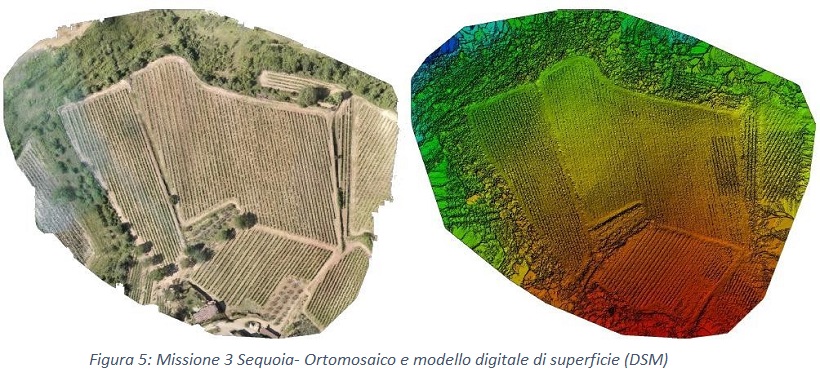
Nell’ordine per ogni missione si riportano:
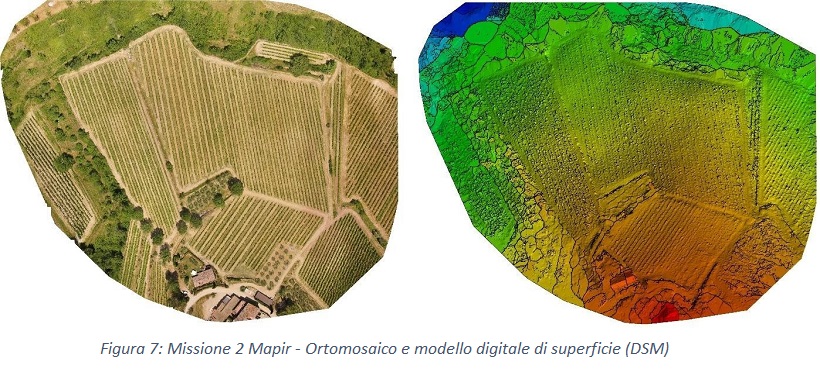
- Ortomosaico e DSM (Digital Surface Model)
- Mappa NDVI
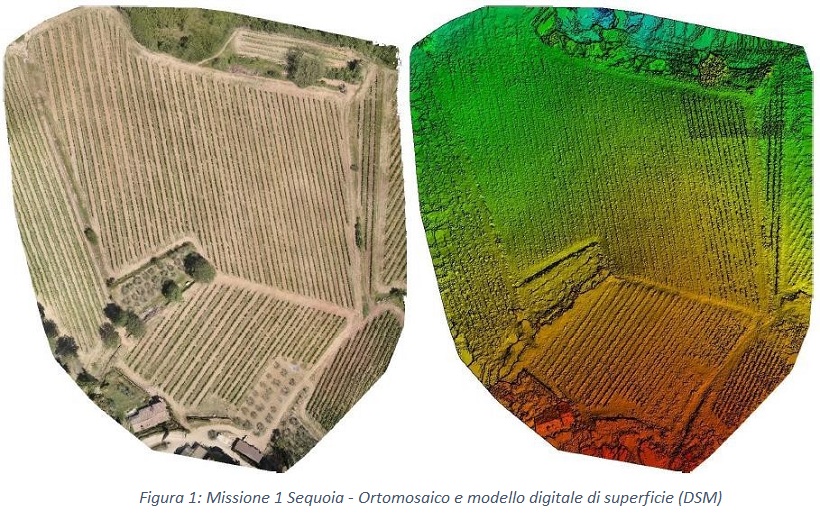

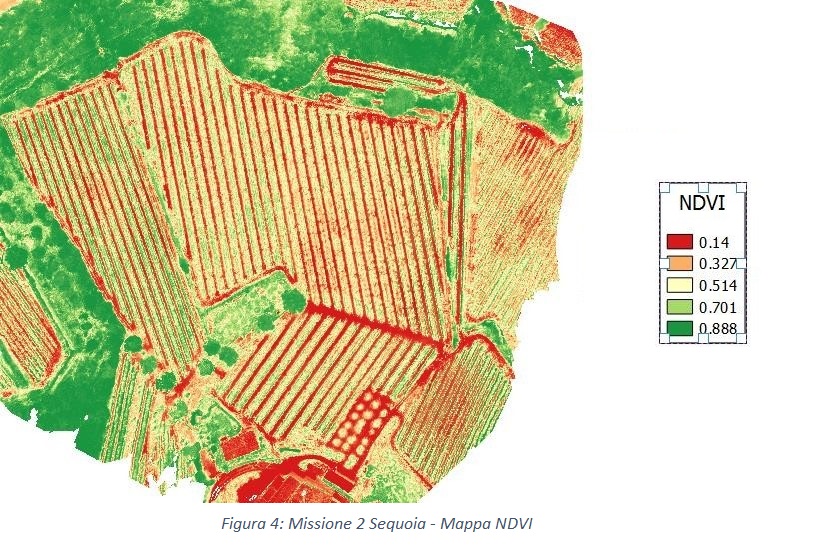
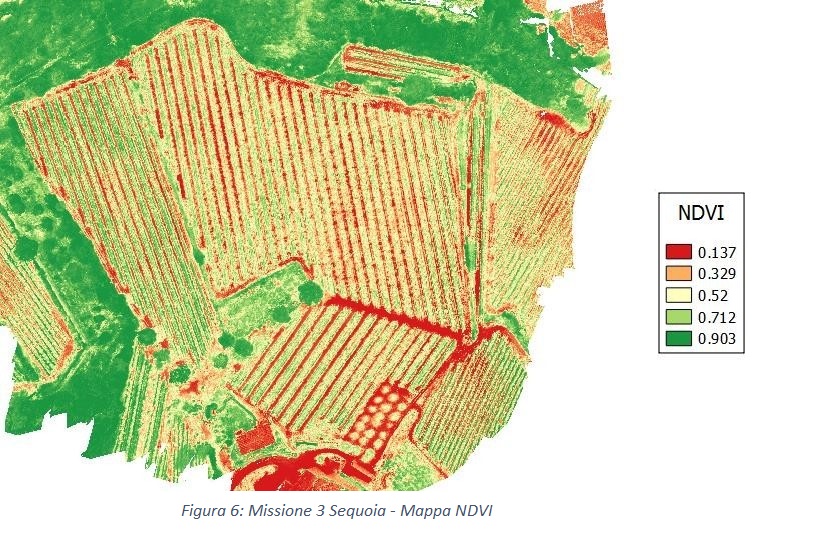
Si può constatare che i valori assoluti degli indici ottenuti con i rilevamenti risultano particolarmente affidabili. Inoltre, zone di alto e basso vigore sono rappresentate qualitativamente bene nelle tre mappe NDVI.
Prendendo in considerazione singole porzioni di vigneto sulla mappa, si vede che il valore degli indici risulta costante per le tre missioni, questo consente di affermare che:
- i dati sono potenzialmente confrontabili se acquisiti in date
- I dati acquisiti sono robusti rispetto a variazioni moderate delle condizioni di luce. Infatti, Sequoia grazie al sensore di luminosità risulta poco sensibile a coperture leggere e temporanee di nubi durante la missione. Affinchè sia garantita la qualità dei risultati è comunque buona norma effettuare i voli nelle ore più calde e in giornate
La risoluzione della camera Sequoia risulta sufficiente per discriminare i filari anche acquisendo i dati da un’altitudine di 60 metri.
3.2 Camere Mapir
Un unico volo è stato effettuato con due camere Mapir RED e NIR. Gli ortomosaici sono stati elaborati secondo le indicazioni dettagliate che si trovano sul sito del produttore delle camere, utilizzando anche i bersagli radiometrici di calibrazione, come suggerito, per normalizzare i dati.
Nell’ordine per ogni missione si riportano:
- Ortomosaico e DSM (Digital Surface Model)
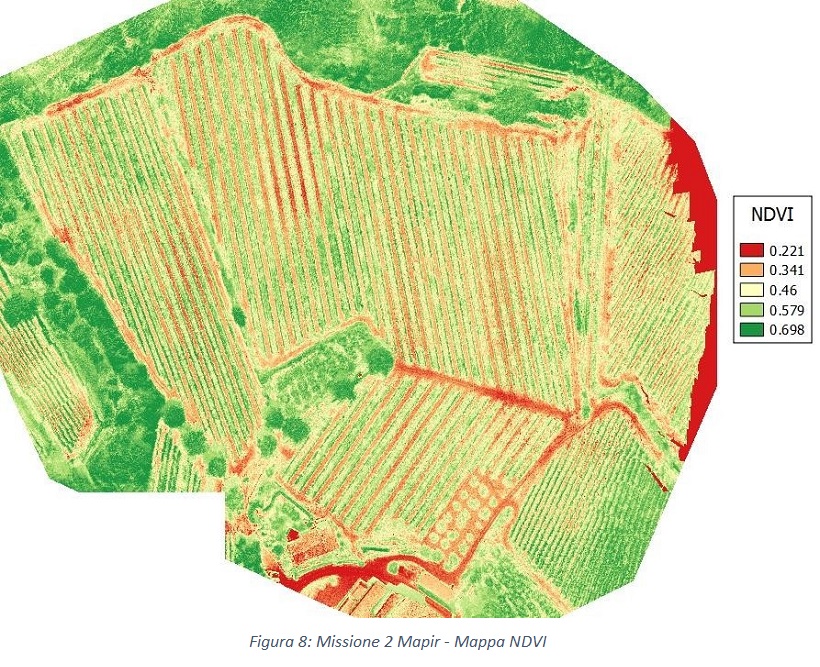
- Mappa NDVI
Di seguito si riporta il confronto tra NDVI rilevato Sequoia e Mapir, relativo alla missione 2.
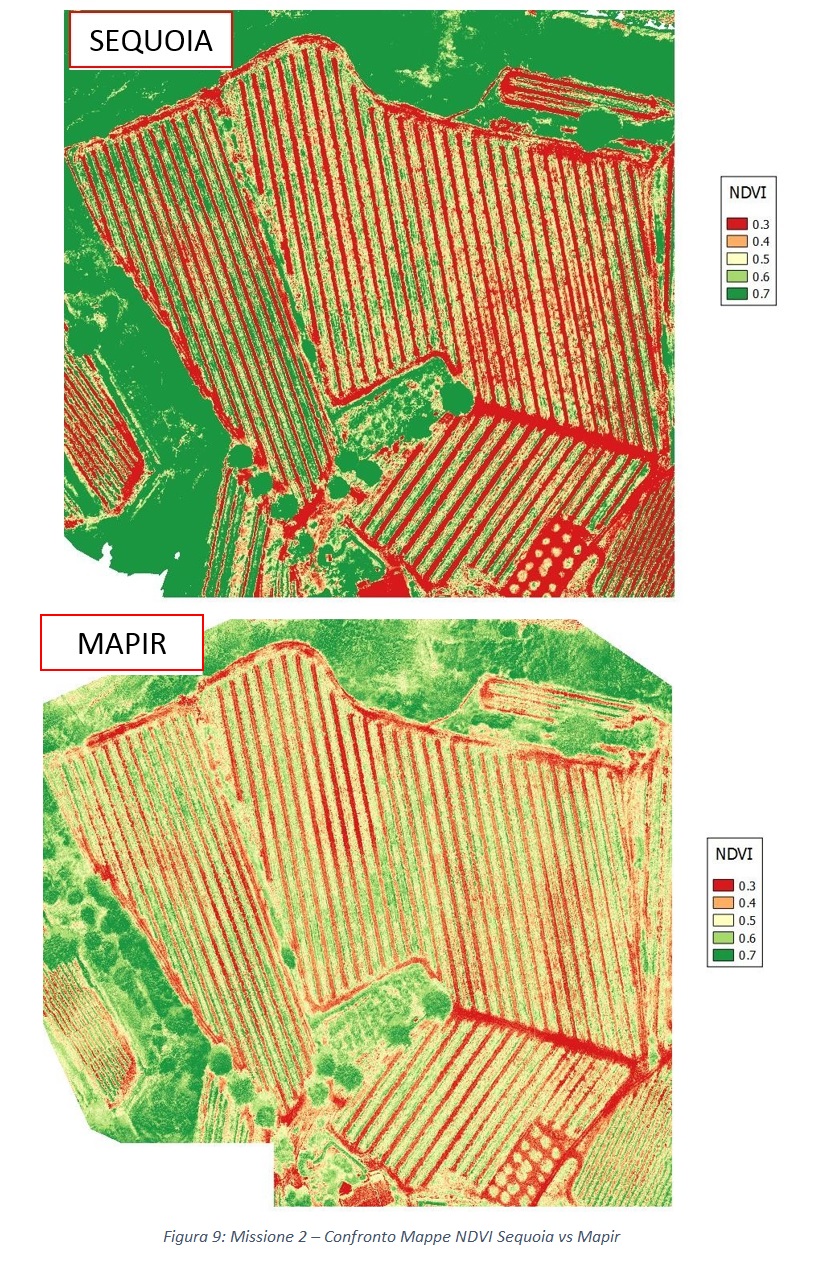
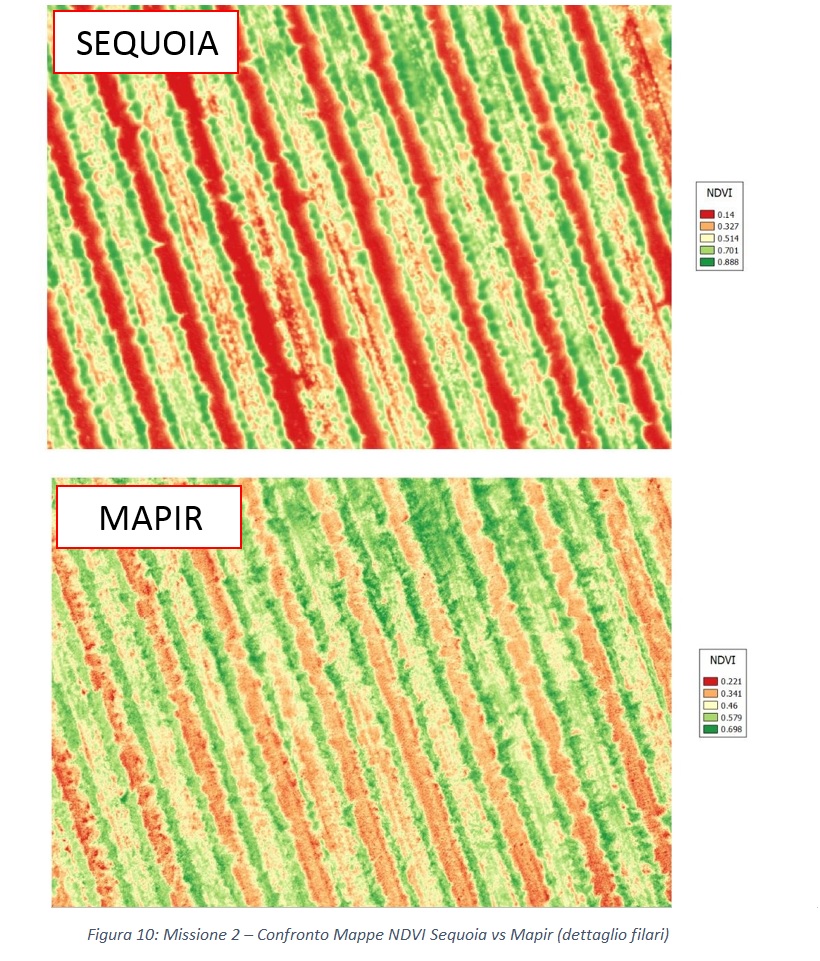
Come possiamo notare dalle immagini nella Figura 9, che sono state scalate sullo stesso intervallo di valori per un confronto più efficace, i dati rilevati sono qualitativamente congruenti tra loro ma sono abbastanza diversi in termini di valori assoluti.
Dalla Figura 10, si rileva che la mappa realizzata con la Mapir ha un dettaglio maggiore all’interno dei filari rispetto alla Sequoia, in virtù di una maggiore risoluzione del sensore.
4. Curve di Riflettanza
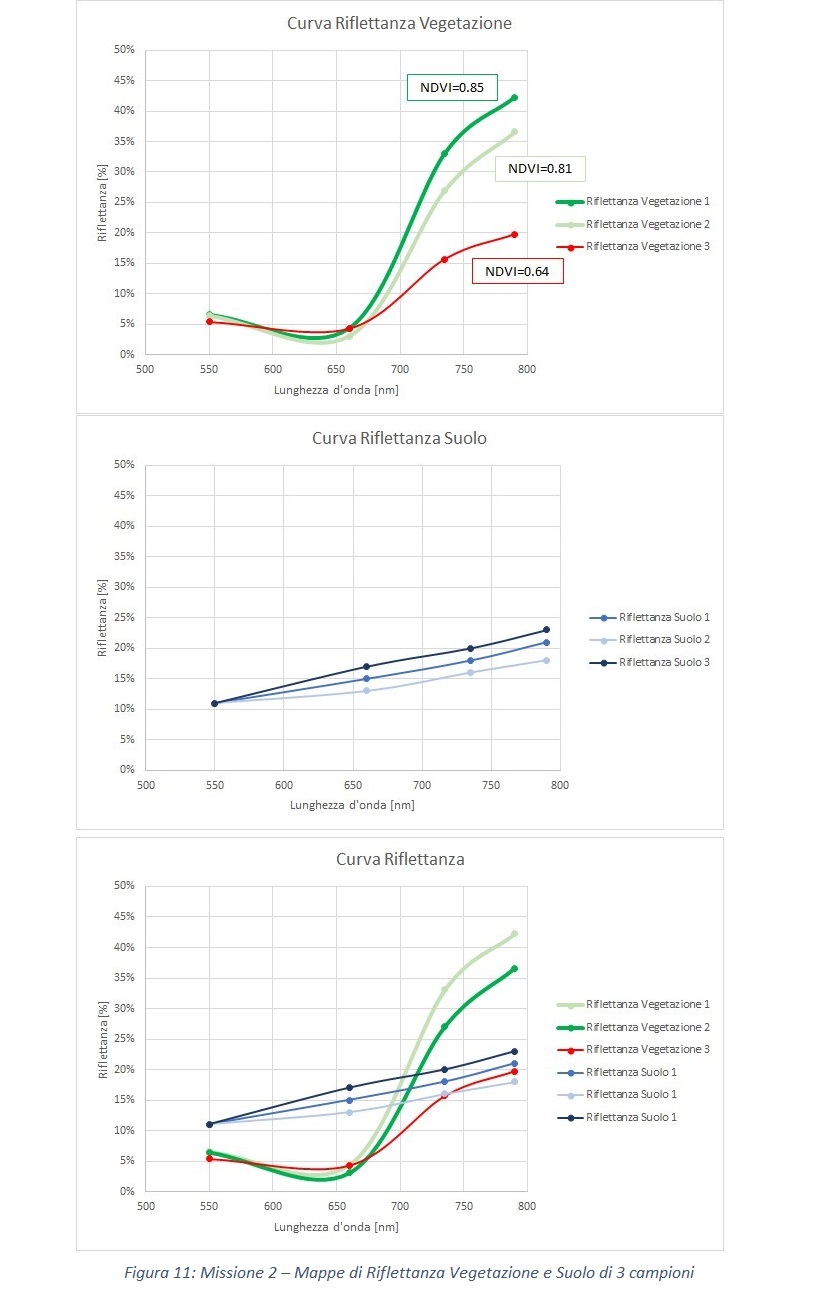
Nei grafici seguenti sono riportate le curve di riflettanza, con relativi valori di NDVI, di tre campioni di suolo e vegetazione (filare) raccolti durante la missione 2 con camera Sequoia. Le curve sono state ottenute prendendo dei punti campione sulle mappe di riflettanza generate dalle 4 bande rilevate dalla camera Sequoia (GREEN, RED, RED EDGE e NIR). Le curve hanno l’andamento tipico che ci si aspetterebbe, sia per il suolo che per la vegetazione.
In particolare, per la vegetazione vigorosa e sana si avranno alti valori di riflettanza nel NIR (curva verde del primo grafico), mentre per la vegetazione meno vigorosa o malata questa riflettanza sarà vistosamente più bassa (curva rossa del primo grafico). Il suolo ha invece un andamento crescente con la lunghezza d’onda e ad un suolo più umido corrisponderà una curva più bassa.
Nell’ultimo grafico vediamo la sovrapposizione delle curve di vegetazione e del suolo. Si nota anche da questa immagine che ciò che ci si aspetterebbe accade. Infatti, il suolo presenta delle riflettanze maggiori nel campo del visibile e delle riflettanze minori nel campo NIR rispetto ad una vegetazione sana. I valori di riflettanza, in termini assoluti, corrispondono a studi analoghi su vigneto.
5. Conclusioni
In conclusione, per riassumere i risultati dell’esperimento, si può affermare quanto segue:
- le camere sono entrambe efficaci nel discriminare zone a differente vigore vegetativo;
- le camere danno risultati qualitativamente congruenti tra loro;
- la camera Sequoia fornisce risultati di riflettanza corretti e confrontabili nel tempo grazie alle correzioni operate dal sensore di luminosità;
- le camere Mapir, avendo una risoluzione maggiore, permettono di avere una mappa NDVI più dettagliata rispetto a quella generata a partire dai dati Sequoia;
- le curve di riflettanza di vegetazione e suolo ottenute da campioni sulle mappe ricavate dalla camera Sequoia rispecchiano la fisica e la natura del problema in questione.
La camera Sequoia è stata progettata per avere dei risultati numerici di riflettanza corretti poiché, attraverso la calibrazione radiometrica ed il sensore di luminosità, è possibile risalire alla riflettanza, ossia alla percentuale di radiazione che viene riflessa da un oggetto nelle varie bande analizzate. Questo è possibile perché, mentre li sensore multispettrale registra la radianza, ossia la quantità di luce riflessa da un oggetto nelle varie bande, il sensore di luminosità registra l’irradianza solare, che è un dato necessario per ottenere la riflettanza. Infatti, il rapporto tra radianza e irradianza è proprio la riflettanza.
Tuttavia, se sono ricercati dei risultati qualitativi utili a discriminare le zone ad alto e basso vigore, le camere Mapir risultano una soluzione alternativa ed economica, che incontrano limiti allorquando una più accurata analisi quantitativa risulti necessaria.
6. Autori della sperimentazione
Simone Kartsiotis (DroneBee, www.dronebee.it)
DroneBee è un’azienda che opera nel settore dell’agricoltura di precisione attraverso l’utilizzo di tecniche di telerilevamento da drone.
Il nome del progetto DroneBee deriva dal termine “Drone” (che significa fuco) e “Bee” (che significa ape), che è un importante indicatore biologico della qualità ambientale: usare il drone come indicatore ambientale e di monitoraggio agricolo è il principale scopo del progetto.
Il progetto nasce per dare una forma mentis al settore dell’agricoltura di precisione, collaborando con esperti agronomi per sviluppare metodologie scientifiche validate e ripetibili.
Portiamo la tecnologia in campo seguendo tutto il percorso operativo, dal rilievo con drone fino allo sviluppo di mappe e loro integrazioni con macchine agricole a rateo variabile per le applicazioni di campo.
Gianluca Rossetti, Matteo Turci, Emanuele Luigi de Angelis ( Zephyr S.r.l., www.zephyraerospace.com)
Zephyr S.r.l. è una giovane azienda nel territorio della Romagna nata nell’ambito dell’Università di Bologna e vede impegnati docenti e ricercatori per offrire servizi di consulenza in campo aerospaziale basati su un’esperienza ormai decennale. Zephyr S.r.l. è anche impegnata in un campo fortemente in espansione, ossia quello dei droni per uso professionale. Il gruppo di lavoro nasce da collaborazioni scientifiche con l’Istituto Nazionale di Geofisica e Vulcanologia, grazie alle quali l’Università di Bologna si è proposta come uno dei primi soggetti al mondo a impiegare i ‘droni’ (parola all’epoca ancora sconosciuta) per applicazioni scientifiche all’avanguardia.
Oggi Zephyr S.r.l. vanta non solo una profonda esperienza e conoscenza del settore, ma anche un utilizzo delle più avanzate tecnologie per il monitoraggio ambientale da remoto. Tali tecnologie sono impiegate nei campi più svariati: dal monitoraggio ambientale alla promozione aziendale, fino all’agricoltura di precisione.
Simone Kartsiotis, ingegnere aeronautico, ha deciso di mettere le proprie conoscenze al servizio dell’agricoltura, sfruttando gli aeromobili a pilotaggio remoto. Ha ottenuto la patente per il pilotaggio di droni e il riconoscimento ENAC come operatore in aree non critiche (ENAC Rif. 7430). Partecipa al progetto DroneBee www.dronebee.it
Gianluca Rossetti, dottore magistrale in ingegneria aerospaziale e dottorando in “Mechanics and Advanced Engineering Sciences” presso il Dipartimento di ingegneria industriale dell’Università di Bologna, è socio fondatore della startup innovativa Zephyr S.r.l. .
Emanuele Luigi de Angelis, dottore magistrale in ingegneria aerospaziale, professore a contratto in Meccanica del Volo e assegnista di ricerca presso il Dipartimento di ingegneria industriale dell’Università di Bologna, è socio fondatore della startup innovativa Zephyr S.r.l. .